Will the box tip over?
#zmp #kkt #dynamics

Think of a box with a mass \(m\) on the ground, with some force \(f\) and a torque \(\tau\) applied to it (it can be the gravity, but also some external forces applied on it like somebody pushing it).
What happens to the box? Your brain effortlessly gives you some possible answers to that question: it might stay in place, it might tip, it might slide, it might be lifted up… How do we determine what actually happens?
Read more »Kinematics of omni-directional wheeled robots
#robotics #kinematics #omnidirectional #wheels
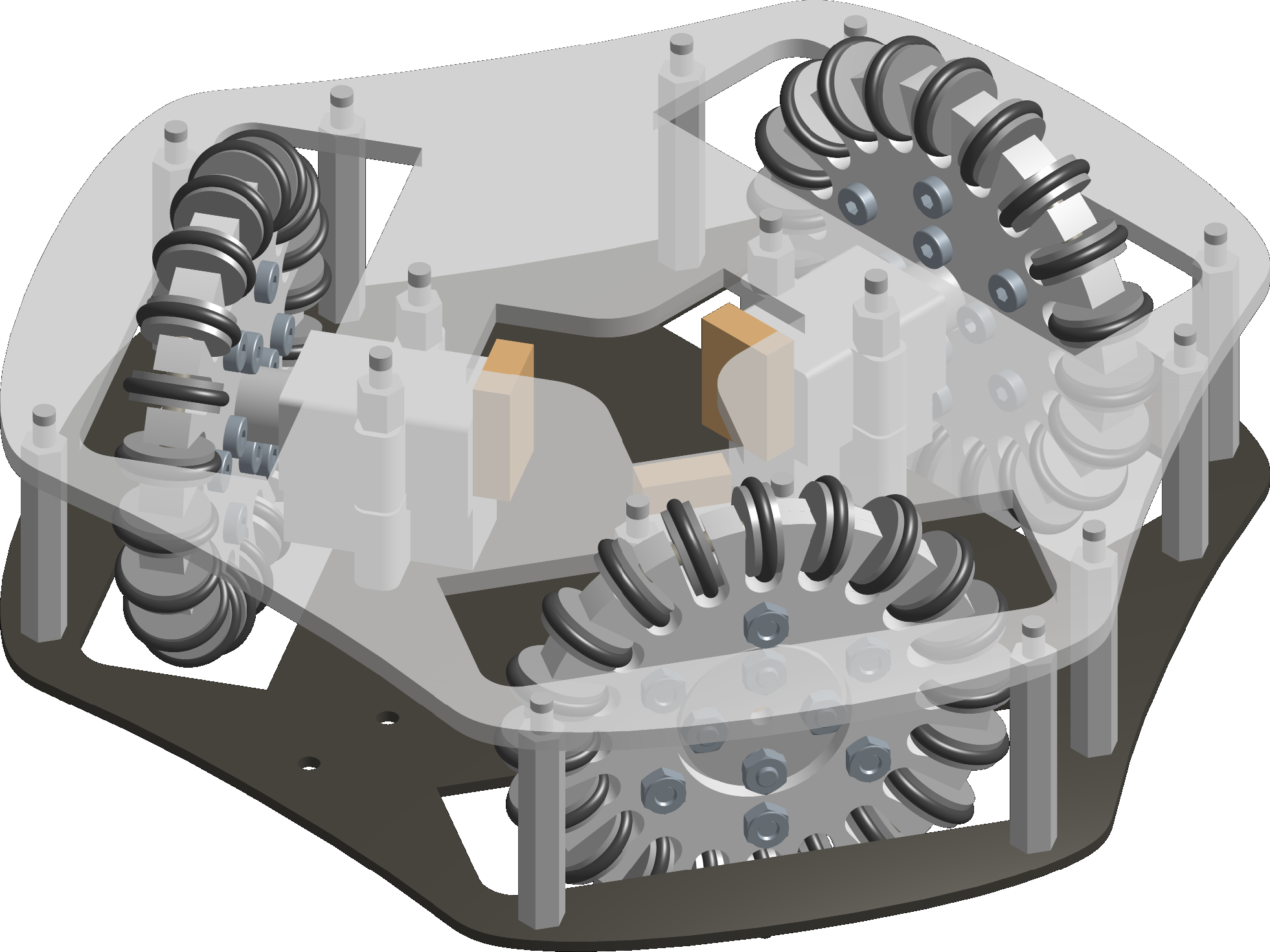
Omni-directional robots (sometime called holonomic robots) are platforms designed to allow a wide range of motion thanks to their wheels mechanically designed to allow lateral sliding motion. You can find such design in our open-source Robot Soccer Kit for instance.
Even if less intuitive than their differential (2-wheels) counterpart, the kinematics model of such platform is arguably easier to derive, and they are easier to control since the motion is less constrained. This is what we are going to explain in detail in this post.
Read more »Computing torques to compensate gravity in humanoid robot
#robotics #humanoid #torques #gravity
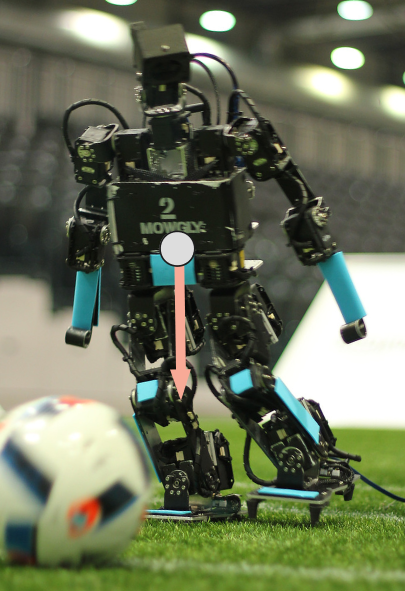
As opposed to robotic arms, humanoid robots are mobile and therefore contact points with the environment should be accounted for when computing their dynamics.
Here, we derive a way to compute the required torque on a humanoid robot standing on either one or two legs to sustain gravity.
Read more »Onshape to robot tutorial
#robotics #urdf #sdf #onshape #cad
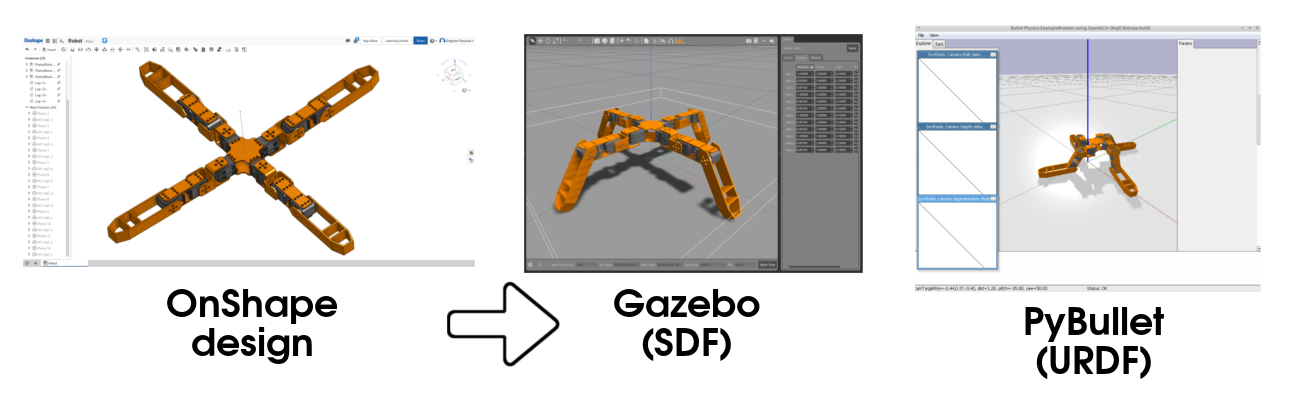
Designing robot involve using CAD software, which is used to create parts and assemblies. Another task when you want to simulate your robot, or manipulate its kinematics chain from software, is to use description format like URDF or SDF files.
Read more »Speed-up platformio mbed build and dfu-util
#embedded #dirty-hacks
Programming micro controllers involves using a lot of tools (cross compilation toolchains, firmware uploading softwares, libraries…). PlatformIO really lightens the process of installing and configuring all of them, and also manage the build of your embedded project.
I’ve been experiencing it using STM32 controllers with the arm mbed framework and DFU USB bootloader, which is natively supported by most of them, and it is actually a good developing environment.
Read more » Gregwar
Gregwar
 @greg_war
@greg_war