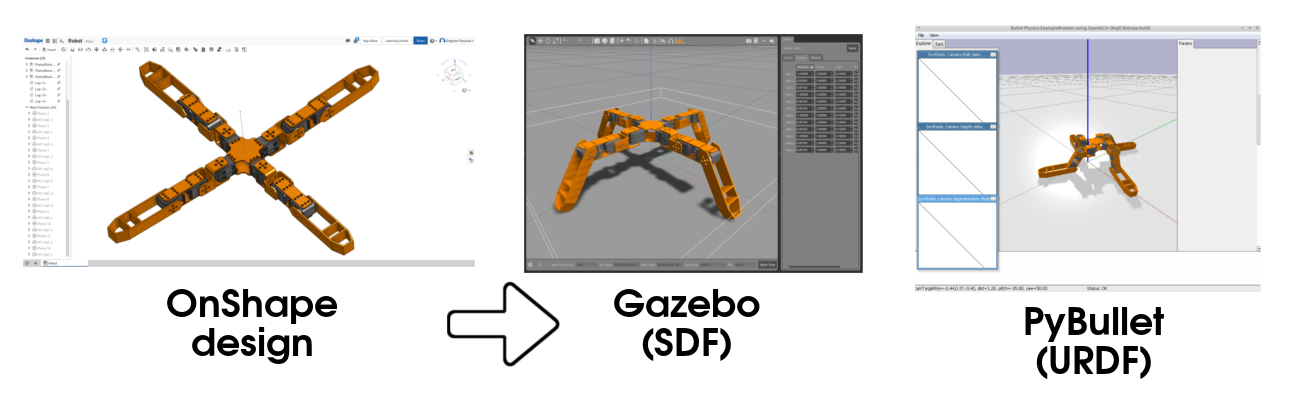
Designing robot involve using CAD software, which is used to create parts and assemblies. Another task when you want to simulate your robot, or manipulate its kinematics chain from software, is to use description format like URDF or SDF files.
Those files are for instance used to load a robot in pyBullet or Gazebo simulator. They can also be loaded in libraries like RBDL or Pinocchio.
However, almost all the information you want are already in the CAD software you use in first place. That is why this process can be heavily automated.
Onshape, a fully-online CAD designing tools, offers a convenients API, that allowed us to build such a software: onshape-to-robot.
 Gregwar
Gregwar
 @greg_war
@greg_war